

Picdelamirand-oil
-
Compteur de contenus
14 450 -
Inscription
-
Dernière visite
-
Jours gagnés
288
Messages posté(e)s par Picdelamirand-oil
-
-
Avec plus de comparaisons quand meme, ce qui me semble intéressant pour les lecteurs canadiens : s'ils ont à faire un choix, ils doivent comparer.
Très belle synthèse.
Bon, il reste encore petits problèmes de mise en page avec les notes de bas de page, mais j'imagine que Prof n'y peut rien. Et rien à faire pour les commentaires, même après s'être identifié (Icedove ou Firefox sous Debian ou Ubuntu). Bref...
La troisième partie est sortie, je suis jaloux.
http://blogs.ottawacitizen.com/2014/03/07/the-rafale-as-canadas-next-fighter-part-3/
-
Hé bhé, dire qu'il y en a 9 a leur livrer comme ça encore ... Et qu'ils ont eu 11 ans pour anticiper les avoir financier a payer a la livraison, même si bon a leur décharge on peut reconnaitre que le programme a 5 ans de retard par rapport aux dates de livraisons estimées quand ils ont signé en 2003 ... Mais ça de toute façon ça a du être renégocié depuis longtemps ce retard avec de nouvelles conditions budgétaires sur lesquelles ils se sont engagés
D'après ce que j'ai compris les Turques prétendent qu'on doit leur livrer un avion ayant ses pleines capacités opérationnelles alors qu'Airbus dit qu'ils étaient convenus qu'il livrerait un avion ayant des capacités logistiques et que ses capacités seraient étendues au fur et à mesure que le programme obtiendrait les autorisations nécessaires.
-
Mirage 2000
dans Europe
Boah? t'es de la DPSD ou quoi? O0
Je voulais juste donner une explication.
-
Mirage 2000
dans Europe
M'en parle pas, je viens de me faire refuser une accréditation pour visiter la base d'Istres... Alors que le lendemain je vais au Luc et le surlendemain a Orange.
Est ce que tu as besoin d'en connaître?
-
Gné? Comment un seul drone peut-il être multistatique???
Les récepteurs passifs sont dans les chasseurs, ainsi que les opérateurs.
-
Que diriez vous d'un (gros) drone AWACS multistatic?
-
Il faut reconnaître que la police d'un tout petit état est chose difficile surtout en l'absence d'AWACS, les radars au sol étant limités par la topographie montagneuse, on repère les intrus au dernier moment.
Dans le cas du détournement qui a retenu l'attention, il était déjà accompagné par des chasseurs étrangers mais il vrai que cela fait un peu cheaps comme police du ciel,
Si on équipe les points hauts en Radar on peut voir partout, y compris au fond des vallées.
-
-
Si je comprends ben l'idée c'est de passer en spectre étalé, je comprends pas bien comment on améliore la sensitivité du système avec ça.
C'est un résumé un peu simplifié, la vraie raison des performances c'est qu'on a une méthode de détection qui dépend plus de la puissance de calcul disponible que du niveau de puissance du signal et qu'on a une technologie qui met à disposition un composant massivement parallèle. Ceci dit j'explique sans doute mal, le mieux est de se reporter au lien que j'avais donné là:http://www.air-defense.net/forum/topic/15062-spectra-et-ce-que-vous-savez/page-9#entry741455, Global locate a fait appel à un pro de l'explication.
Au niveau des récepteurs de nav un récepteur classique détecte jusqu'à - 130 Dbm et un récepteur avec leur composant va jusqu'à - 160 Dbm, la différence est énorme et pourtant c'est la même méthode qui est utilisée mais avec des puissances de calcul différentes.
-
En dehors du timing, ce qui doit importer ce n'est pas la position GPS des avions, mais leur position relative dans "l'antenne" qu'ils forment collectivement. Donc à partir du moment où chacun connait son éloignement et son vecteur, pas besoin de GPS. Technologiquement parlant, ce doit être accessible aujourd'hui.
On parle d'une précision à 5 m même pendant les combats, sinon tu perd ton Radar, ce qui fait désordre.
-
C'est surtout qu'en cas de vrai grosse guerre les satellite de positionnement et de communication pourrait bien être des cible de choix. Ce qui explique qu'on fasse en sorte que les rafale puissent recalé leur centrale inertielle autrement, via la cartographie et leur radar par exemple ou via l'imagerie et la carto, via la radio altimétrie etc. C'est la meme chose que pour les missiles de croisière. Au dessus de la mer c'est plus compliqué.
Pour la base de temps on ne peut pas s'en passer en connaissant un des trajet du signal seulement? le signal "direct" par exemple. Les solutions multi-statique fonctionne souvent comme ça, de manier e relative au signal d'origine.
Cela peut être interne à la liaison: sur la page en lien que j'ai donnée concernant les projets US de nouvelle liaison si on regarde le full announcement il le demande:
Timing and Relative Navigation.
The proposed solutions must be capable of generating precise time synchronization and position information solely via internal mechanisms, in addition to being able to leverage time and position/location information from external sources.
-
Et pourquoi pas une localisation par reconnaissance du sol et analyse du mouvement avec le DDM-NG ;-) ! C'est imbrouillable et si cela se trouve, il voit les étoiles, la Lune et le soleil ce qui permet de fonctionner au dessus de la mer !
J'ajoute que le besoin est en localisation relative, pas absolue. Les avions pourraient donc très bien se passer également la direction dans, laquelle ils se voient respectivement même si cela dégraderait la précision et augmenterait les calculs nécessaires.
Si on a pas de navigation par satellite, on a pas la base de temps précise dont on a besoin.
-
donc par centrale inertielle car gps glonas galileo peuvent se brouiller non?
On peut essayer de les brouiller, mais le signal militaire est prévu pour résister au brouillage. En France on doit éviter de dépendre du GPS mais c'est surtout parceque le bouton on/off n'est pas chez nous, ça pourra changer si on a Galileo en secours.
-
Eurofighter
dans Europe
Mais du point de vue de la comptabilité publique, ça reste valable pour les allemands : si on se base sur un prix "fly-away" à 200Mde $, ils économisent 5,4 milliards d'Euro d'acquisition, plus le coût d'usage, au prix d'une pénalité de seulement 900 millions d'€...
Évidemment, pour les actionnaires d'Airbus, dont les états allemand et français, c'est moins bien...
Sauf si les 900 millions d'€ c'est la marge qu'ils devaient faire sur les 5.4 milliards (16.7% quand même). Auquel cas il n'y a qu'un pb d'emplois mais les actionnaires s'en sortent.
-
Ou utiliser des missiles a guidage IIR nettement moins sensible a la furtivité que les missiles a guidage radar.
Pourquoi ne peut-on pas faire cela déja aujourd'hui quand on voit la puissance de calcul monstrueuse des ordinateur + la loi de Moore ? En plus si c'est déja utilisée dans les satellites GEO.
On peut le faire, mais ça coûte, ça prend du temps et des essais. Le PEA Tragedac va dans la bonne direction. Il faut que ça marche en toutes circonstances, on veut pas un système expérimental mais un système opérationnel. Ce que j'ai décrit c'est juste des principes.
-
Mais en fait la geolocalisation des avions de la patrouille doit pour cela être tres précisément connu non? Si c est le cas ce n zst pas la le point faible du concept?
Tres instructif en tout cas
La liaison leur permet de s'échanger les coordonnées (on suppose qu'ils ont une navigation précise).
-
Avec ce concept, le fonctionnement des chasseurs en patrouille ou le support d'un drone servant de récepteur multistatique passif revient à annuler tout avantage de la furtivité donc ...
Reste que le missile radar en phase terminale ne bénéficie pas de cet avantage décisif actuellement.
Il faudrait donc les guider passivement presque jusqu'à l'impact contre une cible furtive ce qui avec la synchronisation et la transmission reste aléatoire.
Sauf si les missiles emploie une trajectoire lobée avec une attaque par le dessus où la SER doit être beaucoup plus grande que sur la tranche.
Oui, de toute façon même pour faire ça, il y a du boulot, mais moi je vois la 6 eme génération comme cela, le net centric warfare prend tout son sens, et de toute façon c'est normal que l'électronique évolue plus vite que la tôle.
Pour les missiles, le super 530 c'était pas un peu multi-static? on pourrait cultiver ça, avec un AESA la contrainte sur l'avion tireur serait moins forte...
-
Si je comprend bien, tu décris deux nouveautés envisagées :
1) une détection passive par consolidation des informations entre plusieurs avions via liaison de donnée "originale", directive, via les antennes de brouillage de Spectra (qui sont AESA elles aussi, je découvre).
2) une détection active avec un AESA en émetteur principal, des PESA (ou d'autres AESA) servant de capteurs des signaux réfléchis ; l'émetteur coderait en plus des informations dans son signal, information captées après réflexions par la cible (merci la cible !) et qui permettraient aux calculateurs des Rafale "capteurs" de faire leur propre traitement de données avant consolidation (sur un unique appareil ?).
Et donc en prime, un mécanisme de consolidation de données (toujours par le réseau-via-Spectra) et du calcul réparti sur tous les appareils de la patrouille.
Sacré programme... qui va générer plein de questions supplémentaires, plus ou moins spéculatives !
Dans l'option 2, ça augmenterait beaucoup la sensibilité de détection ? Ça fonctionne à partir de combien d'avions, jusqu'à combien ? C'est sensible à la pluie, aux éventuels reliefs derrière les cibles ?
Et je ne résiste pas : ça permet de détecter passivement un F-35 de face à quelle distance ?
On peut envisager de mettre en commun les capacités de brouillage aussi, tant qu'à faire ?
Oui c'est à peu près ce que je suppute
"information captées après réflexions par la cible" c'est plus simple de les décoder dans le signal direct plutôt que réfléchis.
"avant consolidation (sur un unique appareil ?)." Pas besoin de consolidation dans le mode mutistatique, on obtient une localisation aussi précise qu'avec un radar classique dans chaque appareil.
Cela fonctionne à partir de deux appareils (un si on inclu le cas monostatique) et il n'y a pas de limite de principe sur le nombre maximal.
Pour la sensibilité de détection ce que je peux dire c'est que dans le cas des récepteurs de navigation on peut obtenir un gain de processing équivalent au couplage à une antenne de 20m de diamètre.
Un F 35 n'est plus VLO ni LO avec ce principe de détection et comme on a une antenne de 20 m de diamètre on peut le détecter à plus de 300 km.
-
 2
2
-
-
ah donc en ambiance moins securisée, on peut utiliser la liaison 16 pour transmettre les memes elements^^
A titre de comparaison les projets US:
-
Il y a pourtant des formats de messages réservés à la France (J28.4 et J28.5), on peut pas y mettre ce qu'on veut?
(source:http://www.viasat.com/files/assets/assets/Link16_NPG_Message_Card_100112a.pdf)
Autre chose, une fois qu'on a construit le filtre adapté, si on s'y prend comme ça il faut que le radar récepteur surveille plusieurs directions et donc jouer avec toutes les lois de délai correspondantes, ça fait pas exploser la complexité du calcul? Il y a une méthode intelligente pour s'en sortir?
Bon il y a aussi moyen de gagner en portée, en plaçant le récepteur plus près de la cible il y a moins de pertes du signal.
Je ne crois pas qu'on puisse mettre ce que l'on veut dans les messages nationaux, je crois qu'ils ont quand même un format bien défini et qu'on ne peut pas le changer sans un accord.
Question sensibilité à la détection il ne devrait pas y avoir de problèmes : si on compare avec les satellites de navigation on a:
- la puissance d'un tel satellite est de l'ordre de 10 w max celle du RBE2 de l'ordre de 9 kw
- La distance du satellite est de l'ordre de 20 000 km et on cherche des détections de l'ordre de 200 km
- un recepteur de navigation n'a pas d'antenne directive et l'antenne PESA même si elle n'est pas dirigée précisément sur la cible aura un cone non négligeable où elle aura un gain largement superieur à une antenne omnidirectionnelle.
De plus l'approche multistatique a pour but de contrer la furtivité et donc il n'y aura pas de réduction de surface équivalente de la cible.
Si on détecte il suffit de mesurer les retards sans se préoccuper de la direction : à chaque retard une ellipse elle est plus ou moins grande suivant le retard, c'est elle qui détermine la distance. Pour la direction ce n'est pas la réception qui compte c'est la direction dans laquelle le signal a été envoyé c'est à dire l'orientation de l'antenne AESA (qui est une donnée incluse dans le signal).
-
L'utilisation d'une liaison dediée est a la fois une chose positive et negative, non? quid de l'interoperabilité avec d'autres appareils otan en colaboration? ou alors on se rejoue le principe du f-22 avec sa liaison perso?
(j'en profite moi aussi pour y aller de mon compliment a pdla-o (picdelamirand-oil), extremement interessant, même si faut s'accrocher par moment!)
Là on est en train de mettre au point un capteur étendu pour le Rafale dans un premier temps et d'autres avions (drones?) ensuite. L'interopérabilité est assuré par la liaison 16 qui n'est pas supprimée mais qui ne peut pas convenir lorsqu'on veut rester passif. En effet elle est omnidirectionnelle et est reçue par tout le monde!
-
Une fois qu'on a réalisé Tragedac, on a réalisé 80% d'un Radar multistatique. On suppose qu'on utilise les AESA comme emetteurs et les PESA comme récepteurs passifs. L'AESA emet et transmet sur la liaison dédiées les données permettant au PESA de construire une réplique de son signal, celui-ci pourra donc détecter le signal direct (Spectra par exemple) et réflechis (avec son antenne PESA) par corrélation avec la réplique qu'il a construit. Comme on l'a vu, le signal est codé et peut contenir des données. Le signal pourra donc contenir la position de l'émetteur (x,y,z,t) et l'orientation de l'antenne.
Le retard du signal réfléchis par rapport à la date d'émission définit un lieu des positions de la cible qui est une ellipse et l'orientation de l'antenne définit une droite dont l'intersection avec l'ellipse donne la position de la cible. Bien entendu la base de temps commune est encore celle du système de navigation par satellite.
-
 1
1
-
 1
1
-
-
L'étude amont TRAGEDAC, notifié en 2010, a pour but de réaliser pour le Rafale et les futurs drones de combat une localisation 3D passive en réseau afin de pouvoir établir plus facilement une situation tactique, et pour améliorer la réactivité des conduites de tir et leur coordination dans la patrouille. La solution doit pouvoir fonctionner en temps réel en utilisant les informations des capteurs des avions en réseau.
L'idée étant de pouvoir augmenter la précision de localisation d'un ennemi en utilisant des méthodes non-émissives (Spectra et optronique secteur frontal) et en partageant les informations ainsi recueillies au sein d'une patrouille, par exemple via liaison 16. En particulier pour déterminer la distance de la cible qui est la donnée la plus difficile à estimer en se limitant à utiliser seulement des moyens passifs. C'est une modification purement logicielle mais qui, selon la DGA, serait surtout complexe à mettre en oeuvre du point de la vue de la synchronisation des données entre les appareils. De premiers vols d'essais devraient commencer en fin d'année afin de collecter des données.
http://www.air-cosmos.com/defense/le-bourget-2013-la-defense-a-l-honneur.html
Que peut on imaginer comme solution? Le plus simple semble d'utiliser la liaison 16. Mais sur la liaison 16 on transmet des pistes, un relèvement ESM est bien une piste mais si on fait rien de plus on va perdre beaucoup de mesures car la piste doit être entretenue par l'unité participante la mieux placée du point de vue du "track quality". C'est pas ce que l'on veut, on veut des mesures venant des différents avions pour permettre des triangulations, on veut pouvoir alimenter un filtre de kalman avec tout cela afin qu'il nous sorte une position route vitesse de la cible.On ne veut surtout pas perdre des mesures.
Si il n'y avait qu'une piste ce serait relativement facile mais comme il y en a plusieurs il faut pouvoir attribuer les relèvements ESM à chacune des cibles que l'on veut suivre sans se tromper. Pour que le filtre de Kalman fonctionne bien il faudra dater les mesures avec une base de temps précise et commune et j'ai expliqué dans un post précédent comment c'était possible. Pour attribuer les bonnes mesures à la cible il faudra s'appuyer sur l'analyse technique du signal faite par chacun des avions.
Est-ce que la liaison 16 est adaptée pour faire cela? Le problème c'est qu'on ne peut pas la faire évoluer unilatéralement, si on suppose qu'il faut un nouvel "objet" "Mesure" pour implémenter les nouveaux traitements, il sera peut être plus facile d'utiliser une autre liaison que d'obtenir une modification de la L16.
Et puis la liaison 16 c'est pas passif! La preuve c'est que les avions de la patrouille sont censés la recevoir.
Alors il y a dans SPECTRA des possibilité de brouillage directif avec des antennes AESA et ces antennes sont placées de telle sorte qu'elles couvrent 360°. On a le hardware permettant de créer une liaison dédiée qui sera discrète car directive.
Mais on peut aller encore plus loin, on peut vouloir faire de l'auto-corrélation entre une antenne d'un avion et celle d'un autre avion. Le fait d'avoir une liaison dédiée va faciliter ce traitement car on ne sera pas contraint par le protocole de la liaison 16. Le fait d'augmenter considérablement la distance entre les antennes va améliorer la précision, au dela même de celle qui est possible avec l'interférométrie car l'erreur de position (de l'ordre de 5 m) sera petite vis à vis de la distance des antennes. Par contre le traitement doit prendre en compte une plage de retards plus importante ce qui augmente la puissance de calcul nécessaire pour rester en temps réel.
Le fait aussi que les antennes soit éloignées rend significatif la différence de doppler et augmente encore le volume des traitements à réaliser, par contre le doppler est une mesure de la vitesse radiale qui peut faciliter grandement la convergence du filtre de Kalman.
-
1
-
2
-
1
-
-
oh que si !
Si SI SI SI!!!!
Il y a encore besoin d'un peu de préparation. Pour cela je vais donner des explications en m'appuyant sur des exemples tirés des satellites de navigation. Il faut prendre conscience que du point de vue détection la performance des récepteurs de navigation par satellite est extraordinaire. Les satellites sont à 20000 km, la puissance d'emission est de quelques watts, les récepteurs n'ont pas d'antennes grandilocantes, et pourtant ça marche.
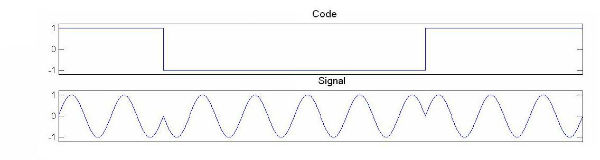
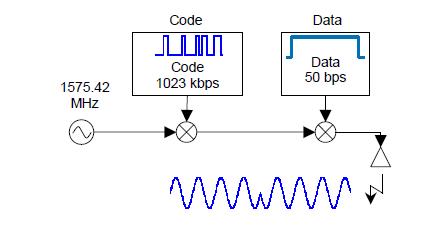
La méthode de détection est celle que j'ai décrite, mais pour que ce soit efficace il faut coder le signal avec des codes qu'on appelle "gold" car ils donnent une forte auto correlation et une faible correlation croisée. Le codage s'effectue ainsi:

Une fréquence pure ne permettrait pas ce principe de recherche par corrélation. En plus du codage le signal peut inclure des data:
Et cela peut être utile comme nous le verrons.
Pourquoi expliquer tout cela? Il faut d'abord comprendre que les radars, les transmissions, les brouilleurs et les satellites de navigations utilisent des techniques electromagnétiques qui peuvent converger; et le signal militaire des satellites de navigation a des caractéristiques très intéressantes. D'abord on sait en réserver l'usage aux alliés: on sait "crypter" le signal afin qu'il soit inutilisable pour ceux qui n'ont pas la clef. Vous comprendrez que je n'en dirais pas plus. On sait aussi le protéger contre le brouillage, le spoofing, ... et toutes les techniques de guerre électronique. Ce qui est bleuffant car c'est un signal extrèmement faible.
Ensuite la collaboration de plusieurs plateforme pour former un capteur étendu bute sur un problème de temps précis qui est justement au coeur de la résolution par le système de navigation du problème de localisation. En effet si il faut 4 satellites pour obtenir des coordonnées c'est parce que les inconnues du problème à résoudre sont les trois coordonnées spatiales et la coordonnées de temps. Les utilisateurs d'un système de navigation ont donc à leur disposition une base de temps partagée qui a la qualité et la précision d'une horloge atomique.
A suivre.
-
1
-
1
-



[Rafale]
dans Europe
Posté(e)
Ils ne veulent pas que le Quatar ait un meilleur armement qu'eux.